
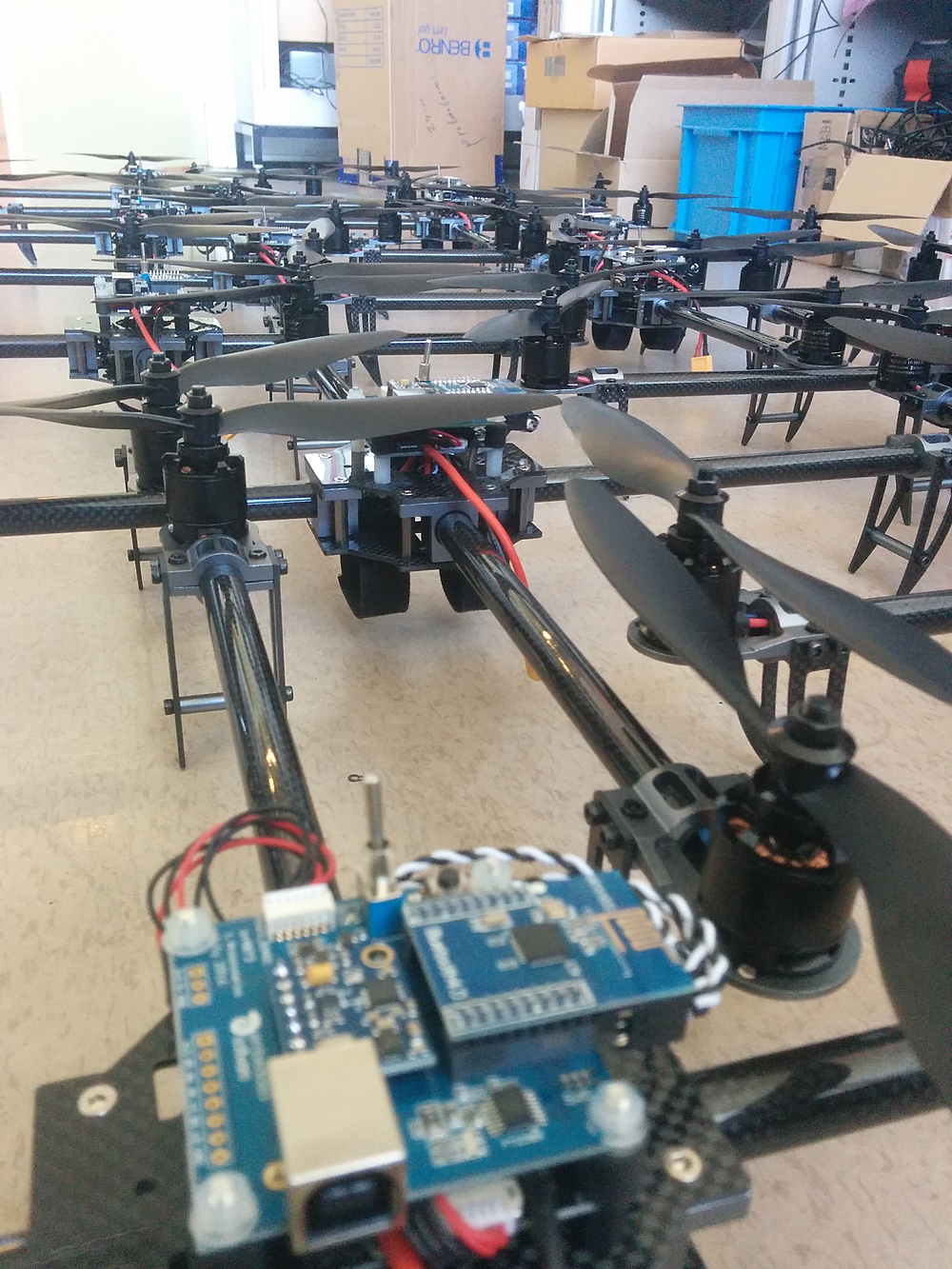
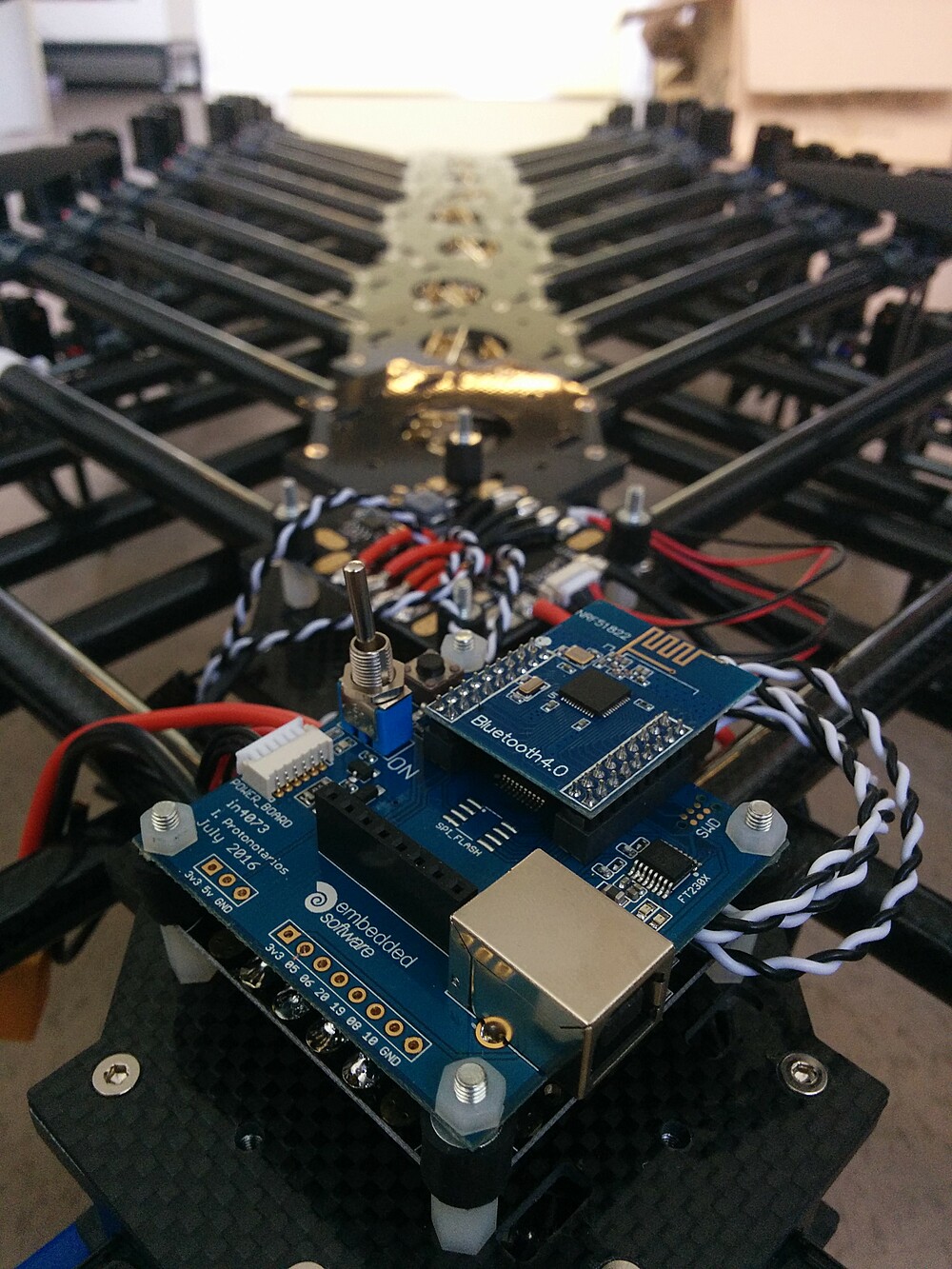
This is the quadcopter used in the Embedded Systems Lab course of the Embedded Systems Msc programme of TU Delft. The
operations manual together with the previous link covers most relevant info about it.
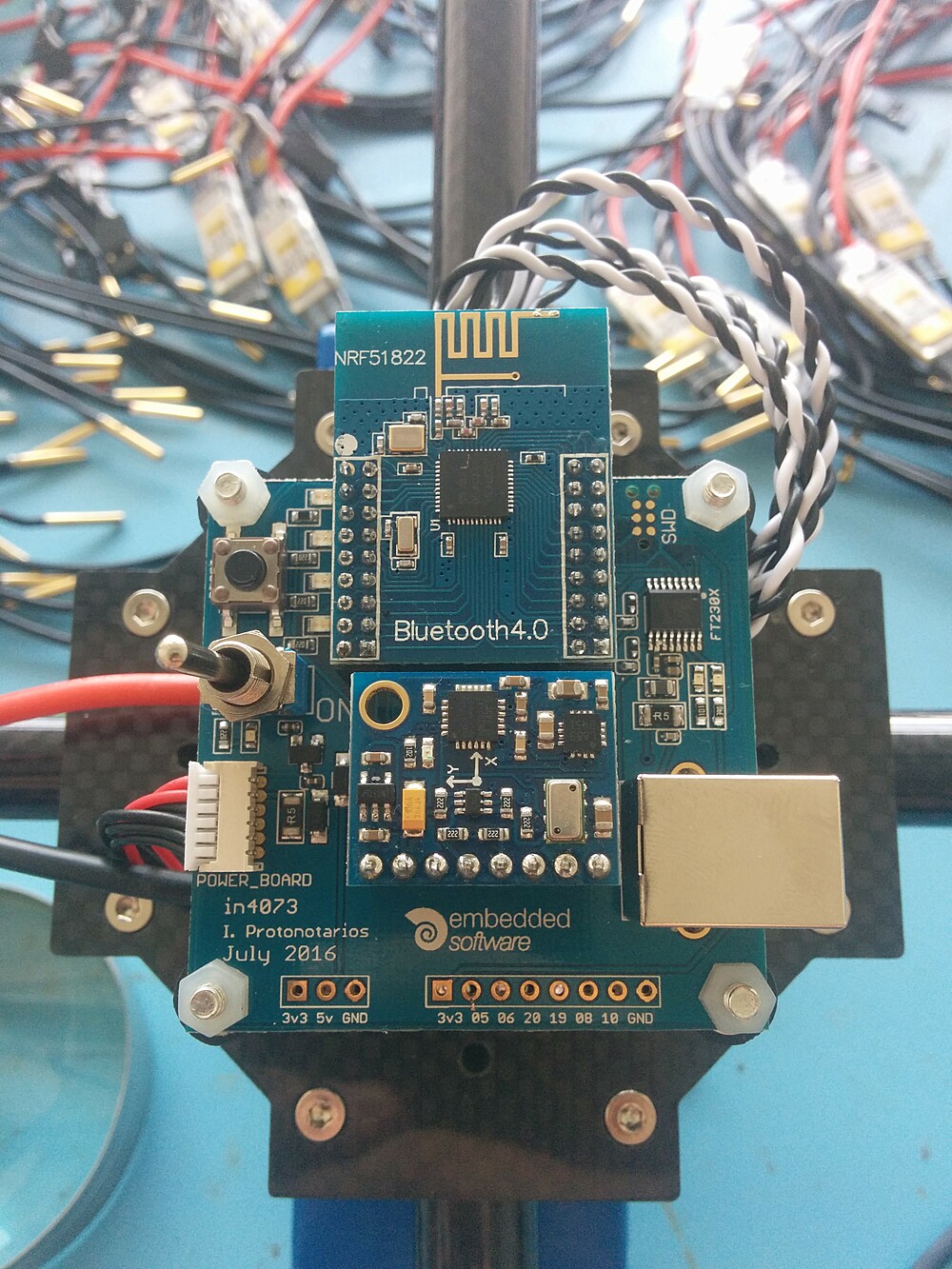
I designed this platform from scratch as we wanted to have a unique hardware/software combination without any major autopilot software support. The nrf51 (BLE enabled cortex-M0) used is not intended for such use, so getting a 1kHz control loop with kalman filtering, height control while communicating through BLE is an almost impossible task.
A true example of an embedded system. Also really fun!